
شبیه سازی بازوی ربات با متلب: با مثال و مراحل اجرا

- مفهوم شبیه سازی بازوی ربات
- مراحل شبیه سازی بازوی ربات با متلب
- مرحله اول: تعیین پارامترهای بازوی ربات
- مرحله دوم: استفاده از Robotics Toolbox برای متلب
- مرحله سوم: ساخت مدل بازوی ربات با rigidBodyTree
- مرحله چهارم: تنظیم سینماتیک
- مرحله پنجم: تعریف محیط و موانع
- مرحله ششم: طراحی مسیر برای انتهای بازو
- مرحله هفتم: شبیه سازی حرکت ربات
- مرحله هشتم: افزودن سیستم های کنترلی و شبیه سازی دینامیک
- مرحله نهم: نمایش نتایج شبیه سازی
- مرحله دهم: افزودن حسگرها و قابلیت های پیشرفته
- انواع شبیه سازی ربات
- استفاده از ابزارهای متلب در شبیه سازی بازوی ربات
- کاربردهای شبیه سازی بازوی ربات با متلب
- مثال شبیه سازی بازوی ربات با متلب
- 1. بارگذاری مدل ربات ABB YuMi
- 2. ایجاد تصویرسازی برای مسیرهای شبیه سازی شده
- 3. افزودن اشیاء به محیط شبیه سازی
- 4. مقداردهی اولیه پارامترهای شبیه سازی
- 5. ایجاد برنامه ریزی وظایف و تولید مسیر
- 6. شبیه سازی مدل اولیه
- 7. افزودن دینامیک اصلی بازوی مکانیکی و طراحی کنترلر
- 8. شبیه سازی مدل جدید
- 9. تأیید فرآیند با مدل Simscape
چکیده مقاله:
شبیه سازی بازوی ربات با متلب از اهمیت بسیار بالایی برخوردار می باشد. امروزه، همراه با توسعه فناوری اطلاعات و مکانیک، ربات ها به طور گسترده تری در تمامی فرآیندهای تولید مورد استفاده قرار گرفته اند. این امر باعث بهبود کارایی تولید، افزایش بهره وری، ارتقای شرایط کاری و تسریع در خودکارسازی صنعتی شده است. بازوی رباتیک نیز علاوه بر کاربردهای آن در محیط هایی با دمای بالا، فشار زیاد، گرد و غبار، نویز، تابش و آلودگی، به طور گسترده در زمینه پزشکی استفاده شده است. همچنین بازوهای رباتیک در صنعت خودرو برای جوشکاری، رنگ آمیزی، بارگیری و تخلیه به کار می روند. در ادامه به مفهوم، مراحل، انواع، ابزارهای متلب، کاربردهای شبیه سازی و مثالی برای شبیه سازی بازوی ربات با متلب خواهیم پرداخت.
مفهوم شبیه سازی بازوی ربات
درجه آزادی یک شاخص فنی اساسی برای ربات می باشد که توسط ساختار آن تعیین شده و به طور مستقیم با انعطاف پذیری آن مرتبط است. درجه آزادی DOF) یا (Degrees of Freedom یکی از شاخص های کلیدی در طراحی و عملکرد بازوی رباتیک می باشد. درجه آزادی نشان دهنده تعداد حرکت های مستقلی است که بازو می تواند انجام دهد. به طور کلی، هرچه درجه آزادی یک ربات بیشتر باشد، انعطاف پذیری آن بیشتر بوده و به عملکرد انسان نزدیک تر می باشد. اما با افزایش درجه آزادی، پیچیدگی ساختار نیز افزایش می یابد. همان طور که در شکل نشان داده شده ، مدل ربات با شش درجه آزادی ارائه شده است. تمامی مفاصل چرخشی، یعنی مفاصل 2، 3 و 4، در یک صفحه قرار دارند و سه محور نهایی مفاصل مدل در یک نقطه با یکدیگر تلاقی می کنند.
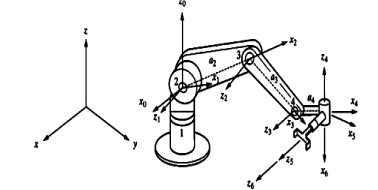
این شبیه سازی بر روی مدیریت مسیر حرکت و نیروی کنترلی بازوی ربات زمانی که با مشکلات محیطی مواجه می شود، تمرکز دارد. بنابراین، مرحله اول شامل طراحی یک ربات پولیش بر اساس بازوی رباتیک چند درجه آزادی و انجام تحلیل سینتیکی برای تدوین معادلات مستقیم و معکوس ربات می باشد.
مراحل شبیه سازی بازوی ربات با متلب
شبیه سازی بازوی ربات با متلب یکی از جذاب ترین و کاربردی ترین مباحث در حوزه رباتیک می باشد که به صورت گام به گام می توان آن را پیاده سازی کرد. در این توضیح، مراحل ده گانه شبیه سازی بازوی ربات را به طور کامل و جامع شرح می دهیم.
مرحله اول: تعیین پارامترهای بازوی ربات
ابتدا باید تمامی پارامترهای مورد نیاز بازوی ربات مانند تعداد اتصالات، نوع مفاصل (چرخشی، لغزشی و غیره)، پارامترهای دنویت-هارتنبرگ (DH)، طول لینک ها، زاویه چرخش لینک ها، فاصله بین مفاصل و زاویه مفاصل را مشخص نمود. این پارامترها مشخصه های فیزیکی و هندسی ربات را تعریف می کنند و برای مدل سازی دقیق ربات ضروری می باشند. پارامترهای DH به ویژه برای تعیین ماتریس های تبدیل بین لینک های متوالی بسیار اهمیت دارند.
علاوه بر این، لازم است نوع اتصالات به صورت دقیق مشخص شود، زیرا انواع مختلف مفاصل مانند چرخشی یا لغزشی رفتارهای متفاوتی دارند. این مرحله شامل تعریف دقیق تمامی ویژگی های مکانیکی ربات می باشد تا بتوان آن را به درستی مدل سازی کرد. تعریف این پارامترها بستری برای پیاده سازی مراحل بعدی فراهم می کند.
مرحله دوم: استفاده از Robotics Toolbox برای متلب
ابزار Robotics Toolbox یک مجموعه از توابع و کلاس ها در متلب می باشد که برای مدل سازی، شبیه سازی و تحلیل ربات ها مورد استفاده قرار می گیرد. این ابزار به کاربران امکان می دهد تا با استفاده از کدنویسی ساده و قابل درک، مدل های رباتیکی خود را ایجاد کنند. به عنوان مثال، می توان با استفاده از این ابزار به راحتی سینماتیک مستقیم و معکوس را برای بازوی ربات محاسبه نمود.
همچنین، Robotics Toolbox قابلیت هایی مانند نمایش سه بعدی ربات، طراحی مسیر، و افزودن موانع به محیط شبیه سازی را ارائه می دهد. این ابزار یکی از بهترین انتخاب ها برای توسعه پروژه های رباتیکی در متلب می باشد، زیرا بسیاری از فرآیندهای پیچیده مانند محاسبات سینماتیکی و دینامیکی را به صورت خودکار انجام می دهد.
مرحله سوم: ساخت مدل بازوی ربات با rigidBodyTree
برای تعریف مدل بازوی ربات، از کلاس rigidBodyTree استفاده می شود. این کلاس ساختاری برای تعریف لینک ها و اتصالات بین آن ها فراهم می کند. هر لینک باید به طور جداگانه با استفاده از rigidBody تعریف شود و سپس لینک ها از طریق مفاصل rigidBodyJoint به یکدیگر متصل شوند. این اتصالات می توانند انواع مختلفی داشته باشند، مانند چرخشی یا لغزشی.
پس از تعریف لینک ها و مفاصل، باید آن ها را به ساختار rigidBodyTree اضافه نمود تا مدل بازوی ربات تکمیل شود. این ساختار امکان شبیه سازی حرکات بازوی ربات را فراهم می کند و به صورت پایه ای برای محاسبات بعدی مانند سینماتیک و دینامیک عمل می کند. در این مرحله، تعریف دقیق هندسه و مشخصات هر لینک و مفصل ضروری می باشد.
مرحله چهارم: تنظیم سینماتیک
در این مرحله، تنظیمات مربوط به سینماتیک ربات انجام می شود. سینماتیک به طور کلی به دو دسته تقسیم می شود:
- سینماتیک مستقیم: در این بخش، موقعیت و جهت گیری انتهای بازو بر اساس زوایای مفاصل محاسبه می شود. برای این کار می توان از تابع getTransform استفاده کرد که ماتریس های تبدیل بین لینک ها را محاسبه می کند و موقعیت نهایی را تعیین می نماید.
- سینماتیک معکوس: در این بخش، زوایای مفاصل به گونه ای محاسبه می شوند که انتهای بازو به یک موقعیت مشخص شده برسد. برای این منظور از توابعی مانند inverseKinematics استفاده می شود. این بخش نیازمند حل معادلات پیچیده ای است که توسط متلب به صورت خودکار انجام می شود.
تنظیم سینماتیک یکی از مراحل مهم در شبیه سازی می باشد، زیرا بدون آن نمی توان حرکات ربات را به درستی شبیه سازی کرد. این مرحله اساس حرکات دقیق بازوی ربات را فراهم می کند.
مرحله پنجم: تعریف محیط و موانع
محیطی که ربات در آن فعالیت می کند باید مشخص شود. این محیط شامل اجسام و موانعی است که ممکن است با بازوی ربات تعامل داشته باشند. این موانع باید به صورت مدل های سه بعدی به محیط اضافه شوند و به درستی در محل مناسب قرار گیرند.
علاوه بر این، تعیین مرزهای محیط و محدودیت های حرکتی بازوی ربات ضروری می باشد. این مرزها کمک می کنند تا ربات به طور ایمن عمل کند و از برخورد با موانع جلوگیری شود. در این مرحله، می توان به راحتی محیط را با استفاده از ابزارهای سه بعدی متلب طراحی کرد.
مرحله ششم: طراحی مسیر برای انتهای بازو
در این مرحله، مسیری برای حرکت انتهای بازوی ربات تعریف می شود. این مسیر می تواند شامل نقاط کلیدی یا یک منحنی پیوسته باشد. برای تعریف مسیر، توابعی مانند trapveltraj، cubicpolytraj یا bsplinepolytraj به کار می روند که مسیرهای نرم و دقیق ایجاد می کنند.
سپس این مسیر باید با استفاده از سینماتیک معکوس به فضای مفاصل تبدیل شود. این فرآیند باعث می شود که ربات بتواند مسیر تعریف شده را با حرکات دقیق مفاصل دنبال کند. طراحی مسیر دقیق و قابل اجرا یکی از مراحل کلیدی شبیه سازی می باشد.
مرحله هفتم: شبیه سازی حرکت ربات
پس از تعیین مسیر، حرکت ربات با استفاده از شبیه سازی حرکت مفاصل مدل سازی می شود. برای این کار می توان از حلقه های زمانی استفاده کرد تا وضعیت ربات به صورت لحظه به لحظه به روز رسانی شود.
در این مرحله از توابعی مانند show و plot برای نمایش وضعیت ربات در محیط سه بعدی استفاده می شود. همچنین می توان از ابزارهای متلب برای ذخیره و تحلیل داده های حرکتی ربات استفاده کرد. این مرحله بخش اصلی شبیه سازی می باشد که نشان دهنده عملکرد واقعی ربات است.
مرحله هشتم: افزودن سیستم های کنترلی و شبیه سازی دینامیک
در صورت نیاز، می توان سیستم های کنترلی برای بازوی ربات تعریف کرد. این سیستم ها شامل کنترل های PID یا مدل های پیشرفته تر می باشند که به بهبود دقت و پایداری حرکت کمک می کنند. همچنین می توان دینامیک بازوی ربات را شبیه سازی نمود تا تاثیر نیروها و گشتاورها بر حرکت ربات بررسی شود.
شبیه سازی دینامیکی نیازمند حل معادلات پیچیده دینامیکی می باشد که با استفاده از ابزارهای متلب به راحتی انجام می شود. این مرحله بیشتر برای پروژه های پیشرفته تر استفاده می شود.
مرحله نهم: نمایش نتایج شبیه سازی
برای نمایش نتایج شبیه سازی، می توان از توابعی مانند show و showdetails استفاده کرد. این توابع پیکربندی ربات، مسیر حرکت و وضعیت مفاصل را در طول زمان به صورت گرافیکی نمایش می دهند.
همچنین می توان نمودارهای سفارشی برای نمایش داده های حرکتی ربات ایجاد نمود. این نمودارها به تحلیل بهتر نتایج شبیه سازی کمک می کنند و امکان بهینه سازی عملکرد ربات را فراهم می نمایند.
مرحله دهم: افزودن حسگرها و قابلیت های پیشرفته
در نهایت، می توان با افزودن حسگرهایی مانند دوربین یا LiDAR، شبیه سازی را تکمیل کرد. این حسگرها به ربات امکان می دهند تا محیط را درک کند و با اشیاء تعامل داشته باشد.
همچنین می توان از تکنیک های یادگیری ماشین یا یادگیری تقویتی برای بهبود کنترل ربات استفاده نمود. این قابلیت ها شبیه سازی بازوی ربات را به یک سطح پیشرفته تر ارتقا می دهند و امکان شخصی سازی بیشتری فراهم می کنند.
انواع شبیه سازی ربات
شبیه سازی ربات می تواند به انواع مختلفی تقسیم شود که هر کدام هدف خاصی را در توسعه و آزمایش سیستم های رباتیک دنبال می کنند:
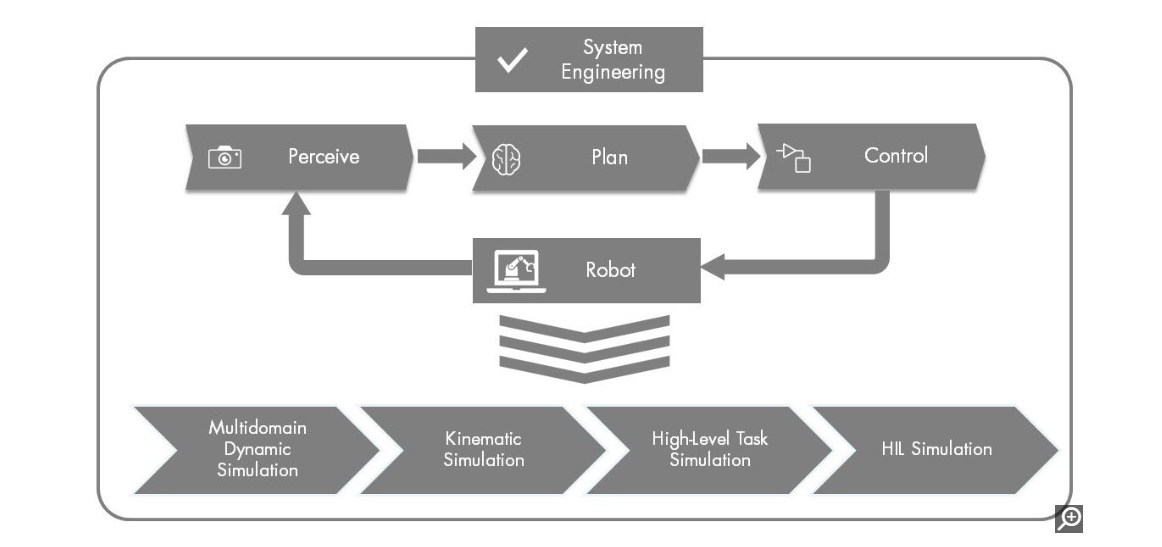
- شبیه سازی های دینامیکی چند دامنه ای
این شبیه سازی ها فیزیک، مانند نیروها و گشتاورها را شامل می شوند تا سیستم های کنترل را تحت شرایط دنیای واقعی آزمایش کنند. این نوع شبیه سازی برای طراحی ربات هایی که با محیط فیزیکی تعامل دارند، مفید می باشد. با استفاده از ابزارهای مدل سازی چند دامنه ای مبتنی بر فیزیک، می توان شبیه سازی دینامیک چند بدنه انجام داد و اجزای مکانیکی، محرک ها و استراتژی های کنترل را به منظور اطمینان از عملکرد مؤثر و کارآمد تنظیم کرد. - شبیه سازی حرکت کینماتیکی
این شبیه سازی ها حرکت ربات را به طور بصری نمایش می دهند و اطمینان حاصل می کنند که مسیرها بدون برخورد و کارآمد هستند. این نوع شبیه سازی برای برنامه ریزی و تأیید مسیرهای ربات در طراحی برنامه های سیستم های خودمختار اهمیت دارد. در این شبیه سازی، می توان توانایی های هوش مصنوعی و تصمیم گیری ربات ها را مدل سازی کرده و شبیه سازی نمود که چگونه ربات ها محیط های مجازی را درک کرده و به آنها پاسخ می دهند، که برای عملیات خودمختار ضروری می باشد. - شبیه سازی های وظیفه ای سطح بالا
این شبیه سازی ها توانایی ربات را در انجام وظایف پیچیده ارزیابی کرده و در تأیید اثربخشی عملیات ربات در سناریوهای خاص کمک می کنند. با استفاده از قابلیت های پیشرفته فیزیک و رندرینگ موتورهای بازی، شبیه سازی های وظیفه ای سطح بالا شامل شبیه سازی ورودی ها و خروجی های حسگر و سناریوهای ربات ها در محیط های پیچیده و پویا می باشند. - شبیه سازی های سخت افزار در حلقه (HIL)
این شبیه سازی ها اجزای سخت افزاری واقعی، از جمله کنترل کننده های منطقی برنامه پذیر (PLC)، را به شبیه سازی وارد می کنند و این امکان را می دهند که سیستم های کنترل صنعتی در زمان واقعی آزمایش و تأیید شوند. شبیه سازی های HIL فرآیند آزمایش را به طور دقیق و کارآمد تسهیل می کنند. این روش برای شناسایی مشکلات بالقوه، بهینه سازی عملکرد سیستم و اطمینان از قابلیت اعتماد قبل از استقرار فیزیکی حیاتی می باشد.
در مجموع، این شبیه سازی ها یک ابزار جامع برای توسعه، آزمایش و بهبود ربات ها فراهم می آورند و اطمینان حاصل می کنند که ربات ها برای استقرار در دنیای واقعی آماده می باشند.
استفاده از ابزارهای متلب در شبیه سازی بازوی ربات
1. جعبه ابزار Robotics
جعبه ابزار رباتیک یک مجموعه از ابزارها و بلوک های آماده است که به شما کمک میکند تا به راحتی رباتها و سیستمهای رباتیک را شبیه سازی، مدل سازی و کنترل کنید. این جعبه ابزار به طور خاص برای کاربرد های مختلف رباتیک مانند طراحی کنترلر، تحلیل مسیر، شبیه سازی دینامیک ربات ها و تعامل با محیط طراحی شده است. در شبیه سازی بازوی ربات، این جعبه ابزار شامل اجزای زیر است:
- مدل سازی دینامیک ربات
این ابزار به شما اجازه میدهد که دینامیک یک بازوی ربات را مدلسازی کرده و رفتار آن را در نرم افزار شبیهسازی مشاهده کنید. مدل سازی دینامیک ربات شامل شبیه سازی نیرو ها، گشتاور ها و حرکت اجزای ربات است. - طراحی کنترلر ربات
جعبه ابزار رباتیک به شما اجازه می دهد تا کنترل کننده هایی برای کنترل حرکت بازوی ربات طراحی کرده و آنها را آزمایش کنید. این کنترلر ها میتوانند از نوع PID، کنترل مبتنی بر مدل، یا کنترلرهای پیشرفته تر مانند کنترل تطبیقی و Machine learning باشند. - شبیه سازی حرکت و مسیر
با استفاده از جعبه ابزار رباتیک، می توان مسیر حرکت ربات را شبیهسازی کرده و بررسی کرد که بازوی ربات چگونه در فضا حرکت میکند و چگونه به تغییرات در ورودی ها یا محیط واکنش نشان میدهد. - شبیه سازی تعامل با محیط
این جعبه ابزار به شما کمک میکند تا تعامل بازوی ربات با محیط (مثل دستکاری اجسام) را شبیهسازی کنید. این کار شامل مدل سازی نیرو های وارد بر ربات در حین دستکاری اشیاء است. - اتصال به سیستم های سخت افزاری
جعبه ابزار رباتیک میتواند به سیستم های سخت افزاری واقعی مثل ربات ها یا شبیه ساز های خارجی متصل شود تا کنترل های طراحی شده در محیط واقعی آزمایش شوند. - پشتیبانی از ROS
از آنجا که بسیاری از ربات های صنعتی از ROS (Robot Operating System) استفاده می کنند، این جعبه ابزار امکان ارتباط و شبیه سازی با سیستم های ROS را فراهم میآورد.
2. Simulink و SimMechanics
SimMechanics و Simulink ابزارهای تخصصی الگوریتم ها، شبیه سازی، پشتیبانی از ROS و اتصال به سخت افزار را برای توسعه ربات های manipulators ارائه می دهند.
با استفاده از SimMechanics و Simulink، شما می توانید:
- طراحی های مکانیکی از CAD را با مدل های سیستم الکتریکی یکپارچه کنید.
- مصرف توان را تجزیه و تحلیل کنید تا بهترین طراحی و مسیر را انتخاب کنید.
- از الگوریتم های از پیش ساخته شده و مدل های حسگر برای برنامه های کاربردی ربات های manipulator که شامل درک و برنامه ریزی حرکت هستند، استفاده کنید.
- الگوریتم های کنترل ربات را طراحی کرده و با یک مدل ربات شبیه سازی کنید، در حالی که محیط شبیه سازی سه بعدی را نیز در نظر بگیرید.
- الگوریتم های دستکاری ربات خود را با اتصال به شبیه سازهای خارجی یا ربات های واقعی ارزیابی کنید.
- با استفاده از SimMechanics و Simulink به ربات ها مانند UR Cobots متصل شوید و آنها را کنترل کنید.
- کد تولیدی را به طور خودکار برای استقرار بر روی کنترلرهای ربات و بردهای محاسباتی درون بردی تولید کنید.
- پروژه های رباتیک خود را با استفاده از مثال های برنامه مرجع ارائه شده پیش ببرید که شامل گردش کار یکپارچه برای توسعه برنامه های کاربردی رباتیک خودمختار هستند.
کاربردهای شبیه سازی بازوی ربات با متلب
1. صنعت خودروسازی
بازوهای رباتیک در صنعت خودروسازی برای انجام وظایف تکراری و سنگین نظیر جوشکاری قطعات، رنگ آمیزی بدنه خودروها، مونتاژ قطعات، و بارگیری و تخلیه استفاده می شوند. شبیه سازی این بازوها با استفاده از متلب به مهندسان کمک می کند تا کارایی و دقت این فرآیندها را افزایش دهند. با استفاده از شبیه سازی می توان مسیرهای حرکت بازوها را بهینه سازی کرد، تا مصرف انرژی کاهش یابد و زمان تولید به حداقل برسد.
علاوه بر این، شبیه سازی امکان پیش بینی و شناسایی مشکلات در سیستم های رباتیک را فراهم می کند. برای مثال، می توان اثر نیروها، گشتاورها، و لرزش های مکانیکی را در شبیه سازی بررسی کرد و راهکارهای اصلاحی را پیش از ساخت واقعی پیاده سازی کرد. این موضوع به کاهش هزینه های طراحی و تولید کمک می کند.
2. پزشکی
بازوهای رباتیک در حوزه پزشکی برای انجام جراحی های پیچیده و حساس مانند جراحی مغز و قلب استفاده می شوند. شبیه سازی در این حوزه به طراحی سیستم های دقیق تر و امن تر کمک می کند. از طریق متلب می توان حرکت دقیق بازوهای رباتیک و میزان فشار وارد شده به بافت های حساس را شبیه سازی کرد تا از آسیب احتمالی به بیمار جلوگیری شود.
همچنین، شبیه سازی به پزشکان این امکان را می دهد که پیش از عمل جراحی، شرایط مختلف را آزمایش کنند و روش بهینه را تعیین کنند. در جراحی های رباتیک، کوچک ترین خطا می تواند عواقب جبران ناپذیری داشته باشد، اما شبیه سازی می تواند چنین خطاهایی را به حداقل برساند.
3. محیط های خطرناک
در محیط های خطرناک مانند مکان های دارای مواد شیمیایی سمی، مواد رادیواکتیو یا دما و فشار بالا، استفاده از بازوهای رباتیک امری ضروری است. شبیه سازی این ربات ها با متلب به مهندسان این امکان را می دهد تا رفتار و عملکرد ربات ها را در این شرایط آزمایش کنند.
با استفاده از شبیه سازی، می توان مسیرهای حرکتی ایمن را طراحی کرد و واکنش ربات را در شرایط پیش بینی نشده بررسی کرد. این کار باعث افزایش ایمنی عملیات و کاهش آسیب به انسان ها و تجهیزات می شود. همچنین، شبیه سازی می تواند به بهبود دوام و استحکام بازوهای رباتیک در برابر شرایط سخت کمک کند.
4. صنایع هوافضا
در صنایع هوافضا، بازوهای رباتیک برای مونتاژ دقیق قطعات حساس مانند توربین ها، بدنه هواپیما، و ماهواره ها استفاده می شوند. شبیه سازی با متلب به طراحان این امکان را می دهد که عملکرد ربات ها را در شرایط جاذبه کم، خلا، یا تغییرات دمایی شدید آزمایش کنند.
به کمک شبیه سازی، می توان فرایند مونتاژ و تعمیر تجهیزات فضایی را با دقت بالا برنامه ریزی کرد. همچنین، از طریق شبیه سازی می توان خطرات احتمالی در فضا مانند شکست مکانیکی یا برخورد با دیگر اجسام را شناسایی و پیشگیری کرد.
5. آموزش و پژوهش
یکی از کاربردهای مهم شبیه سازی بازوهای رباتیک، آموزش دانشجویان و پژوهشگران در حوزه رباتیک است. شبیه سازی با متلب ابزار قدرتمندی است که به کاربران اجازه می دهد تا مفاهیمی مانند سینماتیک مستقیم، معکوس، دینامیک، و کنترل ربات ها را بدون نیاز به سخت افزار واقعی تجربه کنند.
دانشجویان می توانند با شبیه سازی، عملکرد و رفتار ربات ها را در سناریوهای مختلف بررسی کنند و ایده های جدیدی برای طراحی و کنترل سیستم های رباتیک ارائه دهند. این فرآیند نه تنها هزینه های آموزش را کاهش می دهد، بلکه امکان تجربه محیط های واقعی را به صورت مجازی فراهم می کند.
6. کشاورزی هوشمند
در کشاورزی هوشمند، بازوهای رباتیک برای وظایفی مانند برداشت محصولات، هرس گیاهان، و کاشت دقیق بذرها مورد استفاده قرار می گیرند. شبیه سازی این بازوها با متلب به کشاورزان کمک می کند تا فرآیندهای کشاورزی را بهینه کرده و هزینه ها را کاهش دهند.
با استفاده از شبیه سازی، می توان نحوه تعامل بازوی رباتیک با گیاهان را بررسی کرد تا از آسیب به محصولات جلوگیری شود. همچنین، شبیه سازی به طراحی الگوریتم های کنترل برای حرکت بازوها در زمین های ناهموار یا شرایط جوی متغیر کمک می کند.
7. صنایع بسته بندی و لجستیک
بازوهای رباتیک در صنایع بسته بندی و لجستیک برای مرتب سازی، بارگیری، تخلیه و بسته بندی محصولات مورد استفاده قرار می گیرند. شبیه سازی این فرآیندها با متلب باعث افزایش سرعت و دقت عملیات می شود.
در شبیه سازی، می توان نحوه قرارگیری محصولات روی نوار نقاله یا چیدمان آن ها در بسته بندی را بهینه کرد. همچنین، شبیه سازی به طراحی سیستم های کنترل برای جابه جایی محصولات سنگین یا شکننده بدون آسیب کمک می کند. این امر به کاهش خطاهای انسانی و افزایش بهره وری منجر می شود.
مثال شبیه سازی بازوی ربات با متلب
در ادامه مثالی از شبیه سازی بازوی ربات ABB YuMi با استفاده از متلب ارائه شده است که فرآیند “برداشتن و قرار دادن” (Pick-and-Place) را توضیح می دهد. در این مثال از ابزارهای Robotics System Toolbox و Simscape برای طراحی و شبیه سازی استفاده شده است. هدف اصلی، طراحی الگوریتم های رباتیک و شبیه سازی این عملیات در محیط تست با دقت های مختلف می باشد.
1. بارگذاری مدل ربات ABB YuMi
در ابتدا، مدل ربات ABB YuMi بارگذاری می شود. این ربات یک بازوی صنعتی با دو بازو است اما در این مثال تنها از یک بازو استفاده می شود.
شرح کد:
loadrobot: این تابع مدل پیش تعریف شده ربات ABB YuMi را بارگذاری می کند.'abbYumi': نام رباتی که بارگذاری می شود.'Gravity', [0 0 -9.81]: تنظیم نیروی گرانش در راستای محور Z مطابق با شرایط فیزیکی واقعی.
2. ایجاد تصویرسازی برای مسیرهای شبیه سازی شده
برای مشاهده و بررسی مسیرهای حرکت بازو، یک تصویرسازی ایجاد می شود که از ابزارهای تعاملی استفاده می کند.
شرح کد:
interactiveRigidBodyTree: یک ابزار برای تصویرسازی حرکت ربات در محیط شبیه سازی.ax = gca: تنظیم محورهای گرافیکی برای نمایش ربات.
3. افزودن اشیاء به محیط شبیه سازی
برای افزودن اشیاء به محیط شبیه سازی، از یک تابع کمکی مثال استفاده می شود.
شرح کد:
exampleHelperSetupWorkspace: این تابع مجموعه ای از اشیاء برخوردی را به محیط شبیه سازی اضافه می کند.
این اشیاء شامل یک شیء محور (axes object) هستند که دارای برچسب های محور X و Y و حدود 80 شیء از نوع patch، line و surface می باشند.
4. مقداردهی اولیه پارامترهای شبیه سازی
در این مرحله، پارامترهای شبیه سازی برای شروع عملیات تعریف می شوند. از مجموعه ای از پیکربندی های پیش فرض ذخیره شده استفاده می شود:
شرح کد:
load abbSavedConfigs.mat: فایل شامل پیکربندی های پیش فرض ربات.configSequence: مجموعه ای از وضعیت های ذخیره شده برای مفاصل ربات.
وضعیت اولیه ربات شامل موقعیت، سرعت و شتاب هر مفصل به صورت زیر تعریف می شود:
شرح کد:
q0: موقعیت اولیه ربات، که از پیکربندی ذخیره شده خوانده می شود.dq0: سرعت اولیه مفاصل، که در اینجا صفر در نظر گرفته شده است.ddq0: شتاب اولیه مفاصل، که در اینجا نیز صفر است.
5. ایجاد برنامه ریزی وظایف و تولید مسیر
در این مرحله، مدلی که شامل برنامه ریزی وظایف و تولید مسیر است، بارگذاری می شود:
شرح کد:
open_system: باز کردن مدل Simulink با نامmodelWithSimplifiedSystemDynamics.slx.
مدل دینامیک سیستم ساده شده:
برای تمرکز بر برنامه ریزی مسیر، دینامیک سیستم با استفاده از Joint Space Motion Model مدل سازی می شود. این مدل فرض می کند که ربات می تواند با کنترل دقیق به پیکربندی های مشخص شده برسد.
گیره (Gripper):
گیره به عنوان یک ورودی فرمان بولی ساده تعریف می شود که می تواند صفر (بسته) یا یک (باز) باشد. خروجی گیره نشان می دهد که آیا گیره به موقعیت فرمان داده شده رسیده است یا خیر.
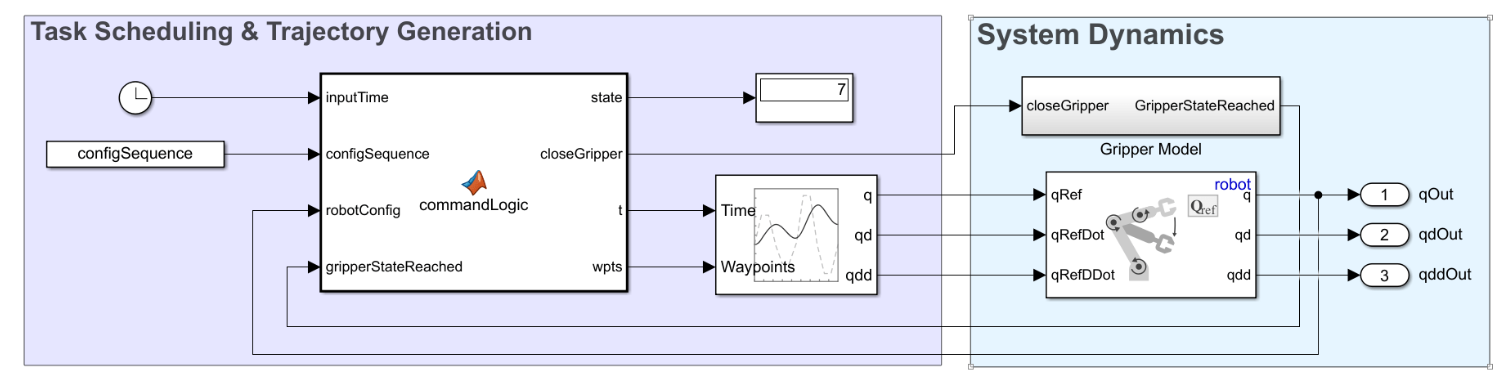
برنامه ریزی وظایف:
برنامه ریز وظایف در این مثال شامل هشت وضعیت است که توسط یک بلوک MATLAB Function به نام commandLogic پیاده سازی می شود. این بلوک وظیفه دارد زمانی که وضعیت گیره به هدف رسیده و همه مفاصل بازو به موقعیت هدف خود با یک آستانه از پیش تعریف شده رسیدند، وظیفه را پیش ببرد.
سری وظایفی که ربات باید از آنها عبور کند شامل هشت حالت است:
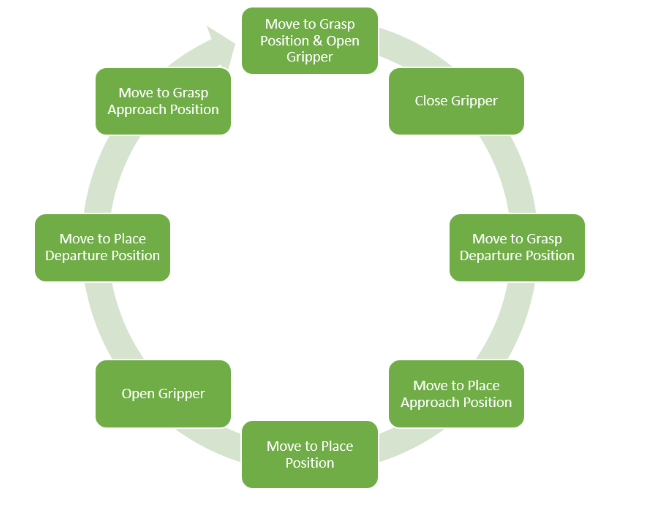
ایجاد مسیر نرم:
وظایف به بلوک Trapezoidal Velocity Profile Trajectory ارسال می شوند تا مسیرهای نرم و بدون نویز بین نقاط مرجع تولید شود.
6. شبیه سازی مدل اولیه
مدل Simulink داده های مربوط به این مثال را در Model Workspace ذخیره می کند. در صورتی که نیاز به بازنشانی متغیرها باشد، می توان با کلیک بر روی گزینه Load Default Parameters آن ها را مجدداً مقداردهی کرد. برای اطلاعات بیشتر، می توانید به مستندات Model Workspaces (Simulink) مراجعه کنید.
شرح کد:
sim: مدل Simulink با نامmodelWithSimplifiedSystemDynamics.slxشبیه سازی می شود.iviz.ShowMarker: نشانگرهای مسیر حرکت غیرفعال می شوند.iviz.showFigure: باز کردن تصویرسازی تعاملی ربات.rateControl: کنترل نرخ نمایش شبیه سازی به نسبت زمان خروجی.- حلقه
for: تنظیم پیکربندی ربات بر اساس داده های خروجی شبیه سازی در هر مرحله.
7. افزودن دینامیک اصلی بازوی مکانیکی و طراحی کنترلر
پس از طراحی و تأیید برنامه ریز وظایف، باید یک کنترلر برای ربات اضافه شود. این کنترلر از دو بخش اصلی تشکیل شده است:
- مدل دینامیک پیچیده تر بازوی مکانیکی.
- کنترلر فضای مفصلی.
برای مشاهده مدل با کنترلر، مدل جدید بارگذاری می شود:
الف) دینامیک بازو
مدل دینامیک بازو وضعیت مفاصل را با توجه به ورودی های گشتاور شبیه سازی می کند. در زیرسیستم Manipulator Dynamics، بلوک Forward Dynamics گشتاور مفاصل را به شتاب مفصل تبدیل می کند. سپس با دو بار انتگرال گیری، موقعیت و سرعت مفصل ها محاسبه می شود. مقادیر اولیه انتگرال ها برابر با q0 و dq0 است.
علاوه بر این، یک زیرسیستم کنترل گیره گشتاورهای کنترل مفاصل گیره را با نیروی ۱۰ نیوتن برای باز و بسته کردن اصلاح می کند.
ب) حسگر گیره
یک حسگر دقیق تر برای گیره اضافه شده است. این حسگر موقعیت فعلی مفاصل گیره را استخراج کرده و آن ها را با موقعیت هدف گیره (که توسط فرمان closeGripper تعیین شده) مقایسه می کند. در صورت تطابق، مقدار وضعیت گیره برابر با ۱ و در غیر این صورت برابر با ۰ بازمی گردد.
ج) کنترلر فضای مفصلی
این مدل یک کنترلر گشتاور محاسبه شده اضافه می کند که از رویکرد مبتنی بر مدل برای کنترل دقیق مفاصل استفاده می کند. این کنترلر به جای استفاده از ربات Rethink Sawyer، از مدل ABB YuMi استفاده می کند.
8. شبیه سازی مدل جدید
مدل با کنترلر جدید شبیه سازی شده و نتایج حرکت مشاهده می شود:
شرح کد:
- مشابه مرحله قبل است، اما این بار مدل دارای کنترلر پیشرفته و دینامیک پیچیده تر می باشد.
9. تأیید فرآیند با مدل Simscape
در این مرحله، مدل های پیچیده تری از ربات و محیط به شبیه سازی اضافه می شود. از Simscape Multibody استفاده می شود که قابلیت مدل سازی دقیق سیستم های فیزیکی را دارد.
ویژگی های Simscape:
- مدل دینامیک دقیقتر:
Simscape دینامیک بازو را با محدودیت های مفاصل و مدل سازی تماس های داخلی دقیق تر شبیه سازی می کند. - محیط Mechanics Explorer:
این محیط تعاملی امکان مشاهده سیستم در طول و پس از شبیه سازی را فراهم می کند.
مدل نهایی بارگذاری می شود:
نتیجه گیری
در این مثال، ابتدا یک فرآیند ساده برای شبیه سازی بازوی ربات ABB YuMi طراحی و اجرا شد. سپس با افزودن کنترلر پیشرفته و دینامیک پیچیده تر، عملکرد مدل بهبود یافت. در نهایت، با استفاده از Simscape، مدل سازی دقیق تر و حرفه ای تری برای شبیه سازی در محیط های واقعی ارائه شد. این فرآیند ابزارهای متلب را به صورت گام به گام برای شبیه سازی و تحلیل بازوی رباتیک به کار می گیرد.



سئو ادیتور2025-12-19T01:08:03+03:30دسامبر 19, 2025|بدون ديدگاه
چکیده مقاله: سئو کلاه خاکستری یکی از تکنیک های بهینه سازی موتور جستجو است که میان سئو کلاه سفید و سئو کلاه سیاه قرار می گیرد. این روش ها معمولاً به استفاده از شیوه [...]

سئو ادیتور2025-12-05T21:34:41+03:30دسامبر 5, 2025|بدون ديدگاه
چکیده مقاله: در سال ۲۰۲۵ بحث سئو کلاه سیاه دوباره به عنوان يک موضوع جنجالی در حوزه بهينه سازی موتورهای جستجو مطرح شده است. با توجه به به روزرسانی های پي در پی الگوريتم [...]
سئو ادیتور2025-12-05T21:41:27+03:30دسامبر 5, 2025|بدون ديدگاه
چکیده مقاله: بهینه سازی هوش مصنوعی یا AIO به عنوان یکی از پیشرفته ترین رویکردهای دنیای فناوری امروز، بر افزایش کارایی، دقت و سرعت سیستم های هوشمند تمرکز دارد. این مفهوم تنها به بهبود [...]

مدیر2025-12-04T00:29:49+03:30دسامبر 4, 2025|بدون ديدگاه
چکیده مقاله: پرپلکسیتی یک موتور جستجوی هوش مصنوعی است که تلاش می کند جستجو در وب را به شکل هوشمند و پاسخ محور ارائه دهد. این ابزار به جای نمایش فهرست طولانی از لینک [...]
مدیر2025-12-01T00:45:09+03:30دسامبر 1, 2025|بدون ديدگاه
چکیده مقاله: انواع مدل های ChatGPT نسل مدل های ChatGPT از نسخه هاي ساده تر مانند GPT-3.5 تا خانواده هاي قدرتمندتر GPT-4 و نسخه هاي بهینه شده آن مانند GPT-4 Turbo و GPT-4o تکامل [...]

مدیر2025-11-28T23:50:42+03:30نوامبر 28, 2025|بدون ديدگاه
چکیده مقاله: انواع مدل های Gemini در سال های اخير به عنوان يکي از پيشرفته ترين خانواده هاي مدل هاي هوش مصنوعي معرفي شده اند و توانسته اند در زمينه هاي مختلف از جمله [...]